Ingenieros de Caltech han creado un robot humanoide que puede desplegar un dron M4, alternando entre varios modos de desplazamiento, y cuyas ruedas pueden transformarse en rotores.
Suscríbete a nuestro boletínUna Sinfonía de Movimiento Robótico – Colaboración entre Caltech y TII – YouTube

Ver en YouTube
Un equipo de Caltech ha diseñado un sistema robótico multimodal: un robot humanoide que expulsa un dron transformable desde su espalda.
Este dron, denominado M4 y montado en la parte posterior del robot humanoide Unitree G1, tiene la capacidad de transformarse, alternando entre los modos de desplazamiento terrestre y aéreo. No estamos ante un Optimus Prime o Megatron; más bien, este autómata lanzador de drones se asemeja a Soundwave, un Decepticon que albergaba en su pecho otros transformadores más pequeños, como drones.
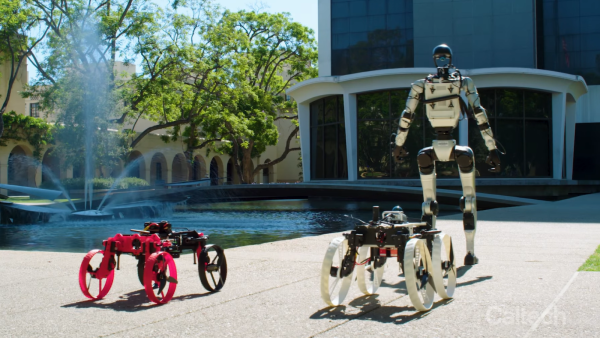
(Crédito de la imagen: Caltech y TII. Producido en asociación con Caltech Academic Media Technologies. Obtenido de Youtube.)
El humanoide puede caminar (aunque hemos visto movimientos más fluidos) y es capaz de subir escaleras y dirigirse al lugar donde ha enviado el dron, si bien a un ritmo considerablemente menor.
“Actualmente, los robots pueden volar, los robots pueden desplazarse por tierra y los robots pueden caminar. Todos ellos son excelentes en determinadas situaciones”, comentó Aaron Ames, director de CAST y profesor de aeronáutica y ingeniería en Caltech, en un comunicado. “Pero, ¿cómo podemos integrar estas distintas modalidades de locomoción en un único paquete, de modo que podamos aprovechar los beneficios de todas ellas y al mismo tiempo mitigar las desventajas que cada una presenta?”
El desafío radicaba en cómo el equipo unió diferentes robots para que pudieran convertirse en un solo sistema, pero manteniendo la capacidad de ofrecer distintas funcionalidades. El dron fue construido por un equipo de CAST dirigido por Mory Gharib, mientras que Ames y su laboratorio configuraron el robot humanoide.

(Crédito de la imagen: Caltech y TII. Producido en asociación con Caltech Academic Media Technologies. Obtenido de Youtube.)
El M4 tiene la facultad de reconfigurar su estructura (transformarse) para adoptar diversas formas de movimiento: puede evaluar el entorno al que debe acceder y seleccionar automáticamente las combinaciones de movimiento más eficaces para maniobrar. El M4 puede rodar sobre cuatro ruedas, convertir sus ruedas en hélices y volar, mantenerse erguido como un suricato sobre dos ruedas, “caminar” utilizando sus ruedas a modo de pies, emplear dos rotores para ascender por pendientes pronunciadas sobre dos ruedas, e incluso desplazarse a tumbos hacia su destino.
La capacidad del M4 para reutilizar sus apéndices como ruedas, patas o propulsores es una característica fundamental. Cuando el M4 necesita volar, las cuatro ruedas se pliegan y las hélices elevan el robot del suelo, o de la espalda del robot humanoide, que se inclina hacia adelante al desplegar el M4.
El objetivo principal de esta colaboración es lograr que estos sistemas autónomos sean más seguros y fiables. Si vamos a tener robots a nuestro alrededor, sugirió Ames, es necesario dedicar más esfuerzos a garantizar su fiabilidad.
“Estamos trabajando en el control de seguridad crítico, asegurándonos de que podemos confiar en nuestros sistemas, asegurándonos de que son seguros”, afirmó Ames en el comunicado. “Tenemos varios proyectos, más allá de este, que estudian todas estas facetas de la autonomía, y estos problemas son realmente complejos. Al contar con estos distintos proyectos y facetas en nuestra colaboración, somos capaces de abordar estos problemas de mayor envergadura y avanzar sustancialmente en el campo de la autonomía de una manera concertada.”
Sourse: www.livescience.com